Robotics is no longer confined to the assembly lines of industrial applications, it is increasingly becoming integrated into our modern life. From autonomous vehicles navigating city streets to surgical robots assisting in delicate procedures, the integration of robotics into society is accelerating at a high pace.
As robotics becomes more embedded in our daily lives, the knowledge required to build, program, and collaborate with them must become more accessible. It is no longer enough for robotics expertise to live behind factory walls or academic paywalls; it is time to democratize motion programming. That is exactly what The Juliet Course for Motion Programming sets out to do.
Watch the course introduction in the video below.
Programming robots is not just about carelessly moving joints. It is about writing precise, safe, and scalable applications for physical motion in real-world environments. It demands a robust foundation, more specifically, a proper robot programming language along with a runtime that enables predictable and safe physical motion.
For decades, robot programming has relied on proprietary languages developed by robotics manufacturers such as RAPID, KAREL, KRL, and INFORM. These were designed in the 80s and 90s, often with limited abstraction, rigid syntax, and little portability. They of course work, and have been running robots successfully for many years. However, they are not built for modern development workflows or scalable integration.
At the same time, new players entering the robotics field often reach for general-purpose languages such as Python or C++. While great for prototyping, these languages lack important aspects such as real-time guarantees and user interactability which are required for proper robotics. This approach often leads to fragile systems, unpredictable behavior, and costly failures.
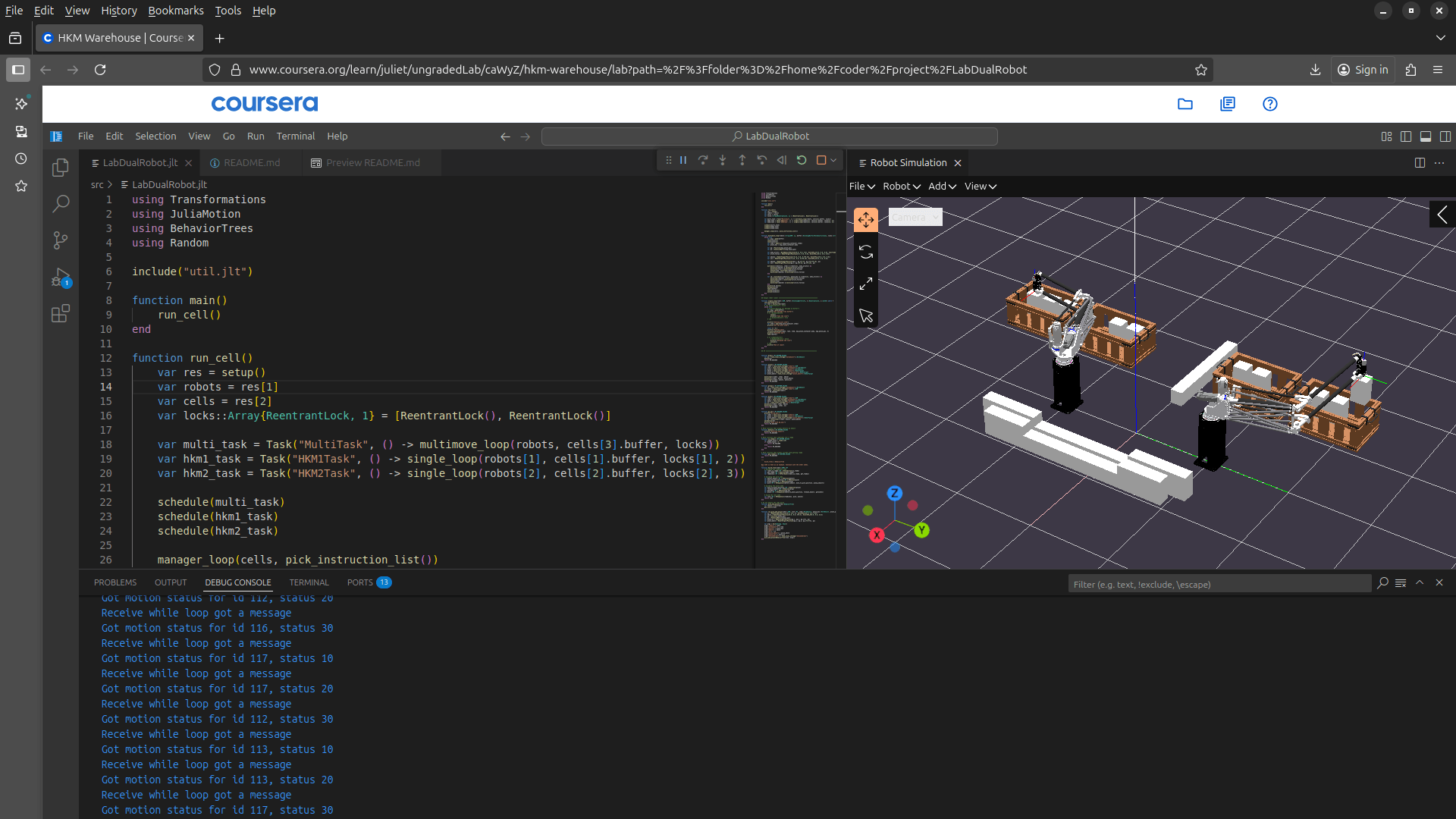
This is where Juliet&Romeo come in. Juliet is a modern high-level robot programming language with expressive syntax that is inspired by its sister language Julia. Romeo is the runtime that executes Juliet code and fulfills requirements that classical robot programming has set over the years, both in terms of safety and user interaction possibilities.
With Juliet&Romeo in place, motion programming can be taught properly. Cognibotics, in collaboration with Lund University, launched the course The Juliet Language for Motion Programming on the Coursera platform. The course introduces the language Juliet and how it can be used to program physical motion. The Juliet Language for Motion Programming provides insight into robot programming from a theoretical perspective and explains how important aspects of programming robots are reflected in Juliet&Romeo.
The course is freely available on Coursera and open to anyone interested in understanding how modern robot programming works. Whether you are beginning your journey in robotics or seeking to deepen your expertise, it offers a structured and accessible way to engage with the principles and practices of motion programming.