
Robot picking applications are becoming more advanced. Modern automation cells often combine robot motion, vision systems, tooling, sensors, PLC logic, AI components, and customer-specific workflows.
When these systems are connected through fragmented, project-specific integrations, automation projects become harder to commission, maintain, and scale. This increases integrator risk and makes future changes more expensive.
Cognibotics addresses this with Juliet & Romeo, the software foundation used to build intelligent automation applications for systems such as the HKM1800.
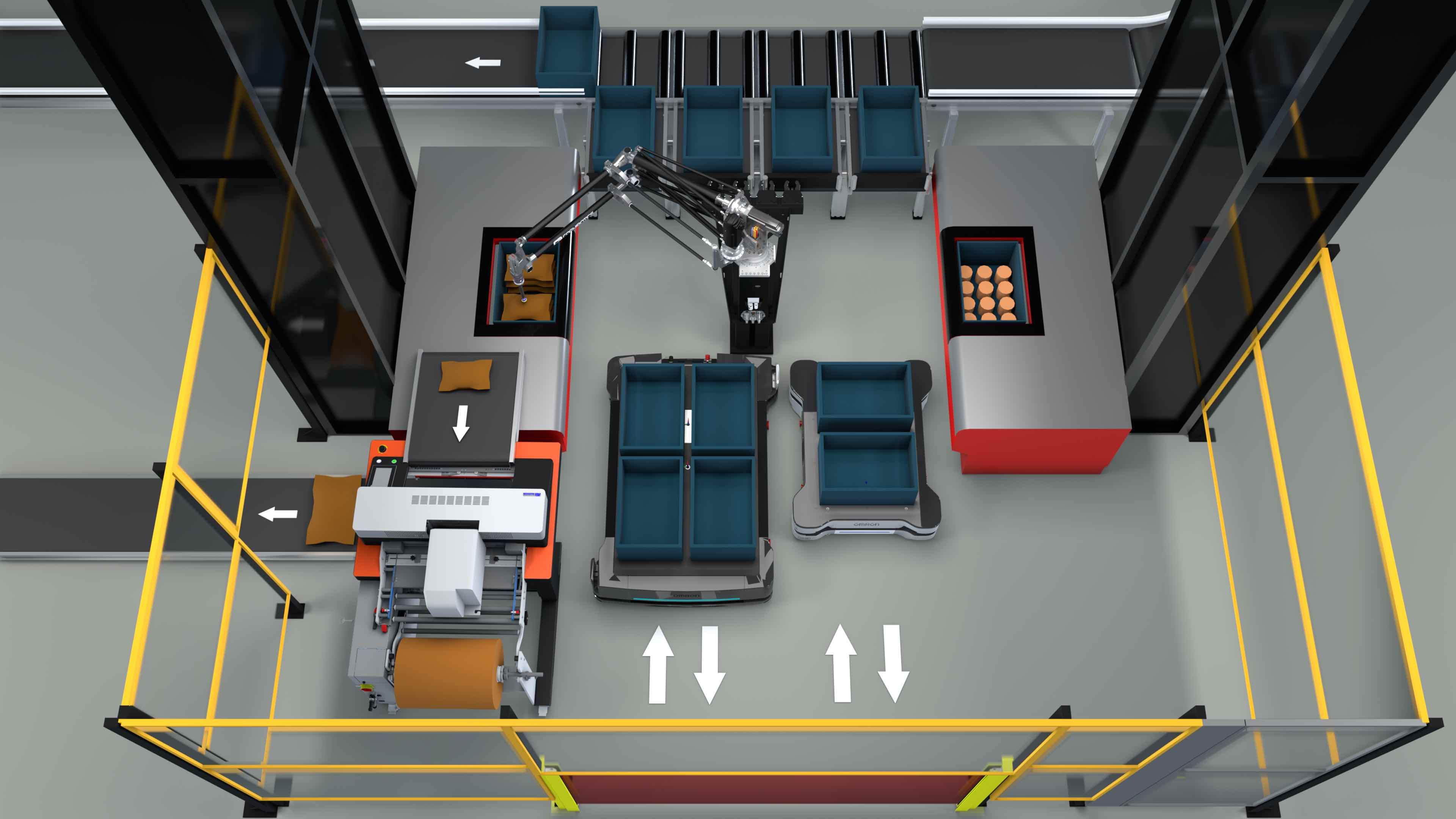
In this video, Johan Lindberg demonstrates how Juliet & Romeo are used in an HKM1800 robot picking application to coordinate robot motion, vision, tooling, and surrounding systems in one automation workflow.
The result is a more structured way to build robot picking applications, with reusable application logic, faster commissioning, and easier customer-specific adaptations.
In traditional automation projects, much of the application logic is spread across different systems. Robot programs, PLC code, vision logic, tooling control, and external system communication are often handled separately.
This makes the automation cell harder to understand, test, reuse, and modify. Small changes can require work across several layers, increasing engineering effort and delivery risk.
For integrators, this can lead to longer commissioning cycles, more troubleshooting, and more project-specific code that is difficult to reuse in the next installation.
Juliet is a high-level programming language for automation and motion logic. Romeo is a real-time runtime that executes applications with deterministic performance and industrial timing precision.
Together, they make it possible to structure robot picking applications in a more reusable and maintainable way.
Juliet & Romeo help automation teams:
Coordinate robot motion, vision, tools, and surrounding systems in one application structure
Reuse application logic across projects instead of rebuilding from scratch
Reduce custom integration work and project-specific code
Make commissioning faster and more predictable
Simplify maintenance, updates, and future modifications
Support modern automation architectures involving robotics, AI, machine vision, PLCs, and industrial systems
The HKM1800 is Cognibotics’ high-speed, long-reach robot platform for demanding picking applications. In this application, Juliet & Romeo are used to manage the automation logic around the robot, making the system easier to adapt, maintain, and scale.
This demonstrates the broader purpose of Juliet & Romeo: not only to program one robot, but to create a reusable software foundation for intelligent automation.

The key shift is moving from one-off integrations to structured automation software.
For integrators, this reduces project risk and lowers the amount of rework needed between projects. For customers, it means faster deployment, easier updates, and a more maintainable automation solution over time.
With HKM1800 and Juliet & Romeo, Cognibotics shows how advanced robot picking applications can be built with less integration complexity and a more scalable software architecture.
Want to explore how HKM1800 or Juliet & Romeo could support your automation project? Contact Cognibotics.
Explore how Cognibotics combines HKM1800 and Juliet & Romeo to make advanced robot picking applications faster to deploy, easier to maintain, and simpler to scale.

Learn how Juliet & Romeo helps automation teams reduce development costs, lower maintenance burden, and create a reusable software foundation for future innovation.
See how the HKM1800 robot platform is designed for high-speed, long-reach picking applications in demanding automation environments.
Want to evaluate HKM1800 or Juliet & Romeo for your automation project?